НАСА начинает работы по созданию прыгающих роботов-кубов, предназначенных для исследований в условиях микрогравитации
Прыгающие роботы
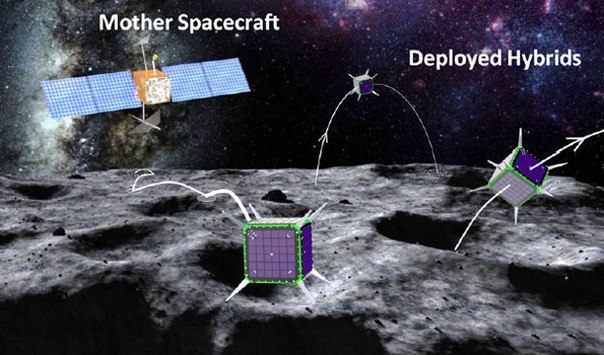
Ни для кого не является секретом, что в ближайших планах американского космического агентства НАСА стоит реализация миссии по изучению достаточно больших астероидов. Несмотря на то, что эти астероиды называют большими, сила гравитации на их поверхности не может обеспечить надежного перемещения колесных, гусеничных или шагающих механизмов, а перемещения механизмов при помощи реактивных двигателей любого типа связано со многими потенциальными опасностями и сложностями, с большим расходом топлива, в первую очередь. И, если вы уже внимательно посмотрели на первое приведенное здесь изображение, то вы уже увидели одно из наиболее перспективных решений — прыгающие роботы кубической формы, которые, словно используя волшебство, могут перемещаться, совершая прыжки при помощи их внутренних механизмов.
Основой двигательной системы прыгающих роботов являются маховики, раскручиваемые до определенной скорости. Такие инерциальные системы уже давно опробованы на Земле и используются в инерциальных системах ориентации некоторых космических телескопов. К сожалению, при помощи такой инерциальной системы невозможно получить высокую точность перемещений, тем не менее, только такая система позволит прыгающим роботам добраться туда, куда не смогут добраться другие роботы в условиях микрогравитации.
Кроме вышеупомянутого преимущества, у инерциальной системы имеется несколько других преимуществ. Эта система не имеет никаких внешних движущихся частей, что сказывается в положительную сторону на ее надежности. Такая система не потребляет никакого топлива, источником энергии для ее работы могут служить лишь несколько тонких и легких солнечных батарей, покрывающих корпус робота. В качестве опор корпуса могут быть установлены зонды различных научных инструментов, выполняющих измерения многих параметров окружающей среды. Система управления роботом может быть очень проста, она должна быть способна лишь выполнять примитивные действия и команды, передаваемые с базового космического аппарата, на плечах которого лежит вся работа по координации действий группы сброшенных недорогих прыгающих роботов-разведчиков.
В настоящее время руководство НАСА выделило финансирование данному проекту, предназначенное на переход этого проекта с уровня TRL 2 на уровень TRL 3.5. Уровень TRL (Technology Readiness Level) — это официальный показатель, значение которого определяет, как далеко продвинулся тот или иной проект от стадии первоначальной идеи к стадии изготовления полностью работоспособных устройств. Уровень TRL 2, к примеру, это уровень «сформулированной технологической идеи», уровень TRL 3 — «теоретическое и физическое доказательство работоспособности представленной идеи», а уровень TRL 4 — это уже «создание макетов и компонентов, способных функционировать в моделируемой окружающей среде».
Для того, чтобы быть отправленным в космос, проект должен выйти на уровень TRL 8, чему соответствует «создание законченной функциональной системы, прошедшей расширенную программу испытаний в условиях, максимально приближенных к реальным». И, к тому времени, когда НАСА соберется отправлять исследовательскую миссию на какой-нибудь астероид, проект прыгающих роботов имеет все шансы выйти на уровень TRL 8.